AP19579370 «Разработка автономного мобильного робота и системы распознавания объектов для патрулиров
Разработка автономного мобильного робота предназначенного для выполнения патрулирования открытых и закрытых пространств, применяя модифицированную генетическим алгоритмом нейронную сеть для распознавания различных объектов.
Технологический стек
Ключевые слова
Команда проекта
Эксперты, которые работали над этим решением




Задача проекта
В работе применяются методы из областей вычислительной техники, машинного обучения, компьютерного зрения, робототехники и распознавания образов. Основной акцент сделан на использовании сверточных нейронных сетей и их оптимизации с помощью генетических алгоритмов для повышения точности и производительности классификации изображений. Для решения задач автономной навигации рассматриваются алгоритмы SLAM и их модификации с использованием различных сенсоров. Экспериментальные исследования включают распознавание объектов в разнообразных условиях и тестирование автономного робота в реальной среде. Для обучения и проверки применяются как открытые базы данных (MNIST, ImageNet, CocoDataset), так и собственные наборы данных.
Результаты проекта
Блок-схема генетического алгоритма для обработки изображений при слабом освещении и оптимизации модели YOLOv5
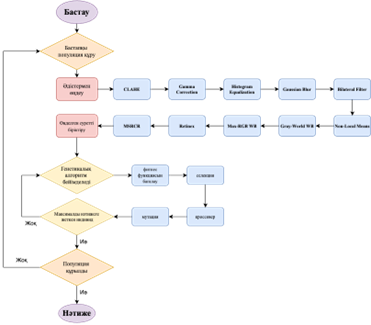
Блок-схема генетического алгоритма для обработки изображений при слабом освещении и оптимизации модели YOLOv5
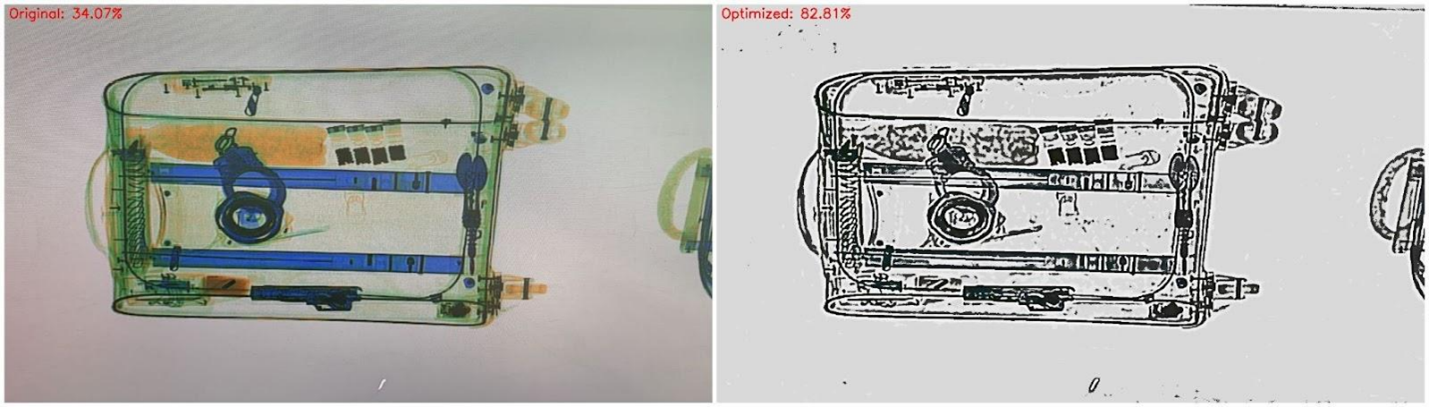
Рисунок 2а. Исходное и обработанное изображение и точность
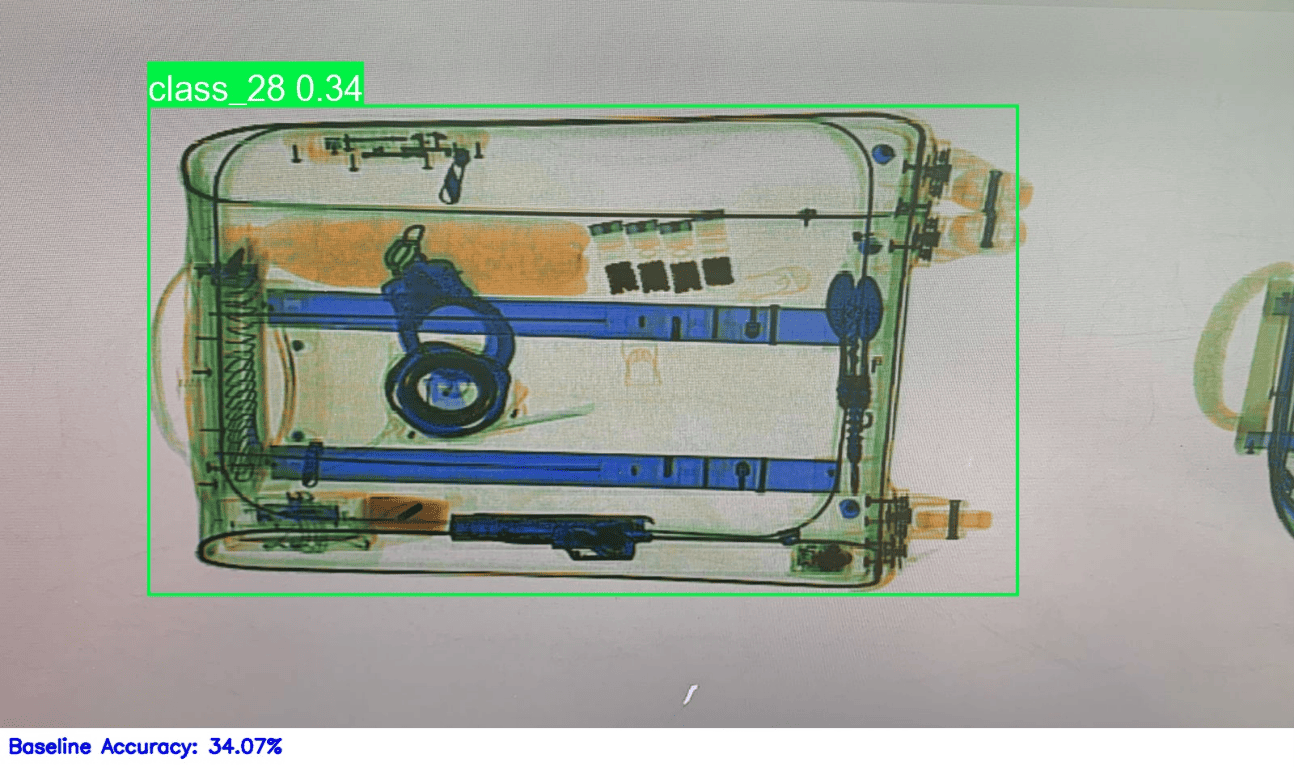
Рисунок 2б. Детекция YOLOv5 на оригинальном изображении при слабом освещении. Средний уровень достоверности-34.07%
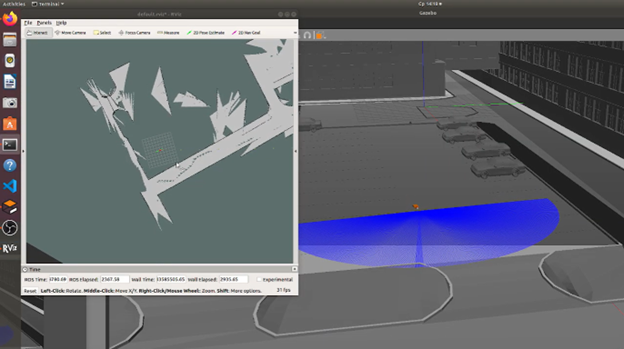
Рисунок 3. Построения карты при использовании сканера
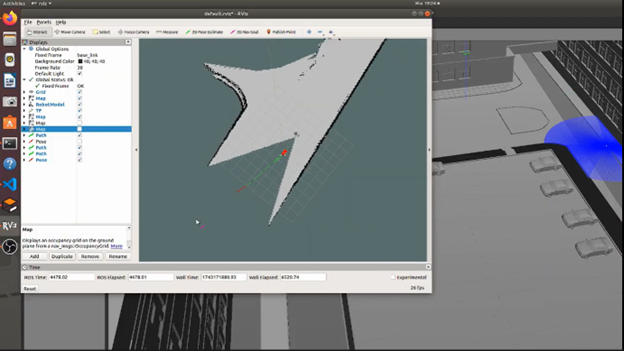
Рисунок 4. Езда робота по дороге по прямой с помощью навигации
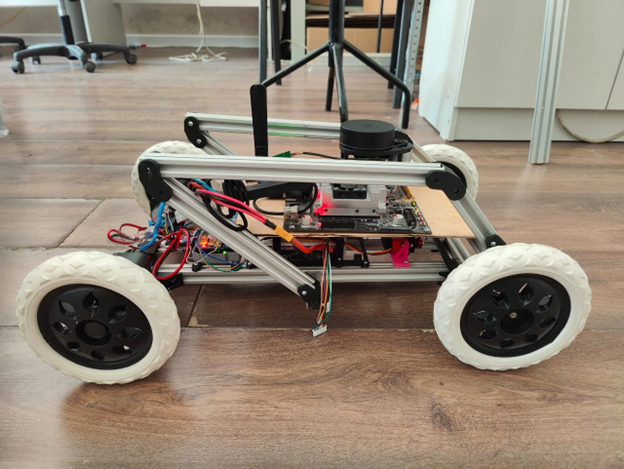
Рисунок 5. Мобильный робот